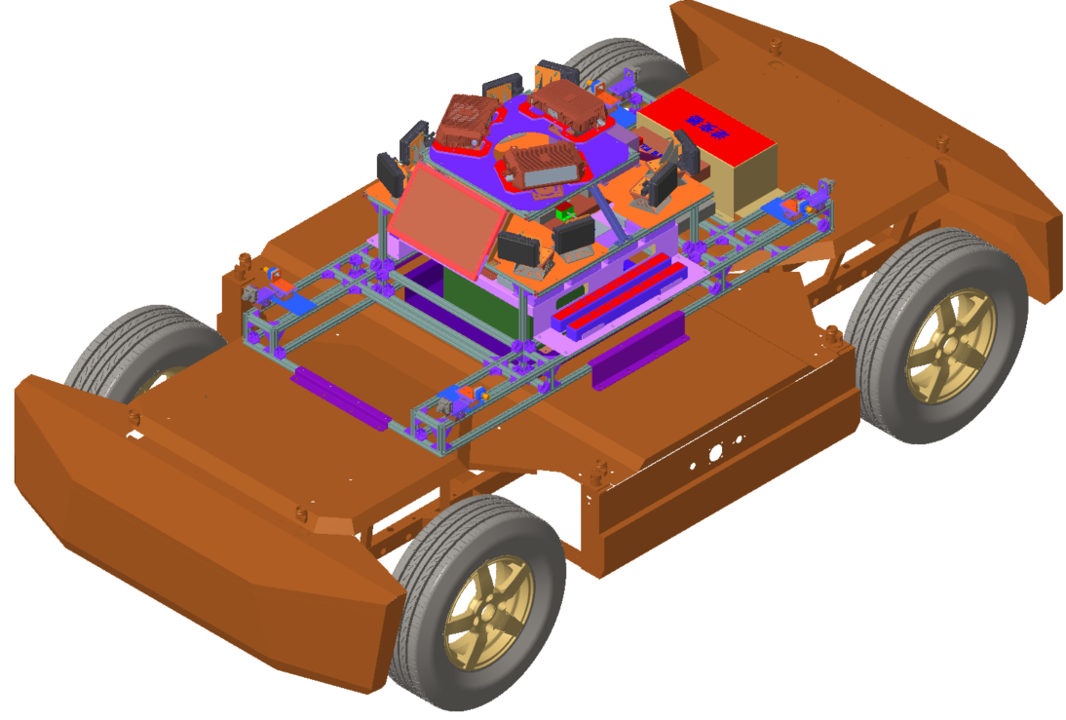
One of the major aspects for 4D autonomous radar sensing systems is the data acquisition and fusion platform for autonomous vehicles. An autonomous electrical vehicle with the sensor configuration as shown in Fig. 01: Data Acquisition Platform is used and will be testing at the Minhang campus of Shanghai Jiaotong University.
The data was collected from a research platform and does not represent the setup used in the FUSION product. For sensor locations, please refer to Fig. 01: Data Acquisition Platform. we publish data for the following sensors:
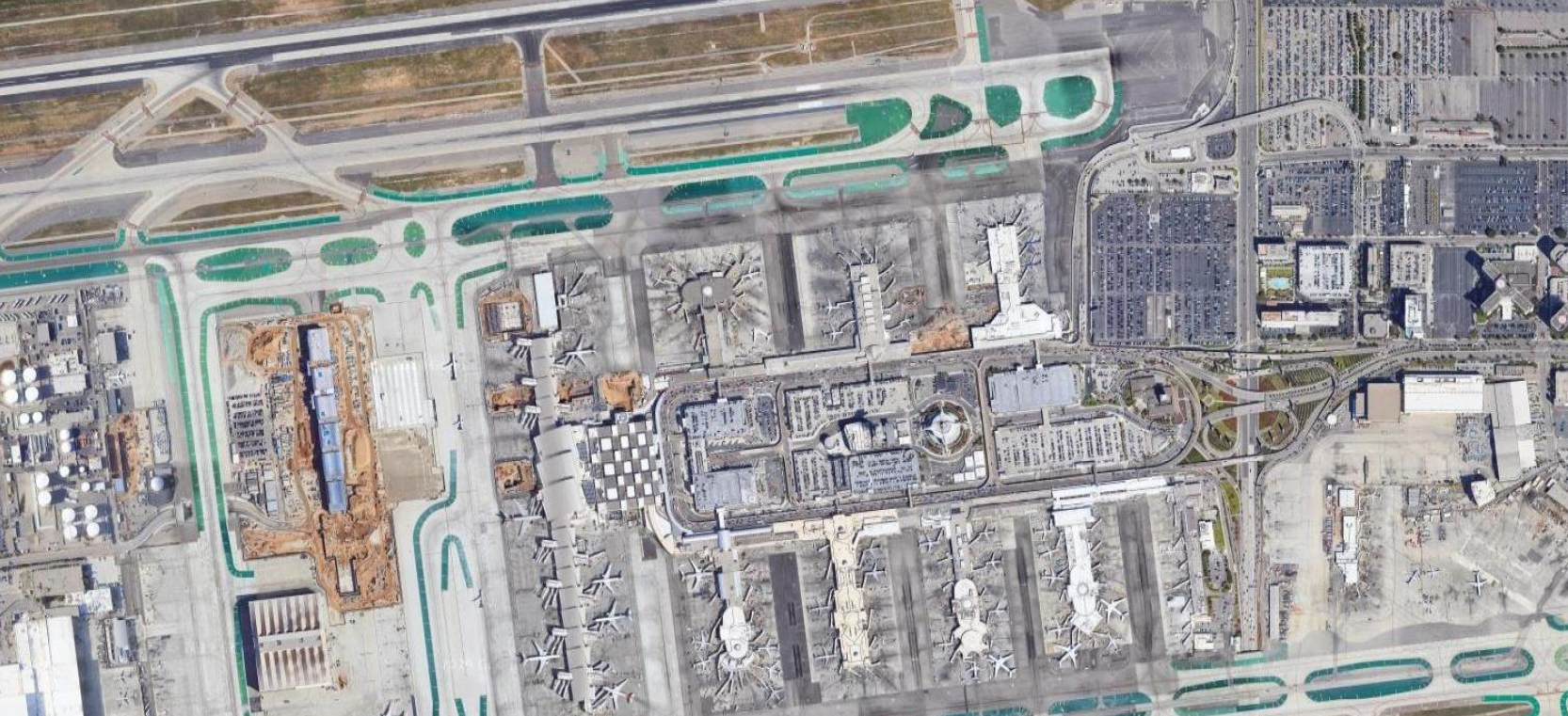
For the Fusion dataset, we plan to conduct initial data collection at the Minhang campus of Shanghai Jiaotong University, as refer to Fig. 02: Shanghai Jiao Tong University Minhang Campus. We will divide the school into several key driving areas, where data collection will be conducted.
We will expand to a wider range of scenarios after obtaining permission from the relevant authorities.
Fig. 02: Shanghai Jiao Tong University Minhang Campus
The real setup of the sensors is shown in the car-setup, and the overall modular design has a high degree of user customizability.
The sensors are arranged in layers to reduce overall interference, the strong and weak power systems are isolated from each other to ensure safety, and the single sensor system is independent of other sensors to achieve electromagnetic compatibility.
The data collection vehicle is equipped with 8 Continental ARS548 millimeter-wave radars with a 120° field of view and two output channels, Objects and Detection.
We use SenSing Intelligence’s 8-channel 8-megapixel YUV camera to collect RGB data, and hard-synchronize the camera data through the GMSL board,
where four cameras are wide-angle 120-degree cameras, and four are 60-degree cameras, which are capable of capturing 360-degree images around the bodywork without any dead angle.